As I mentioned in a previous post, I purchased an Arcol.hu hot end. This week, I started assembling it. Lazlo’s got some good instructions up on his website, so I was able to follow those and assemble the hot-end without any dramas at all.
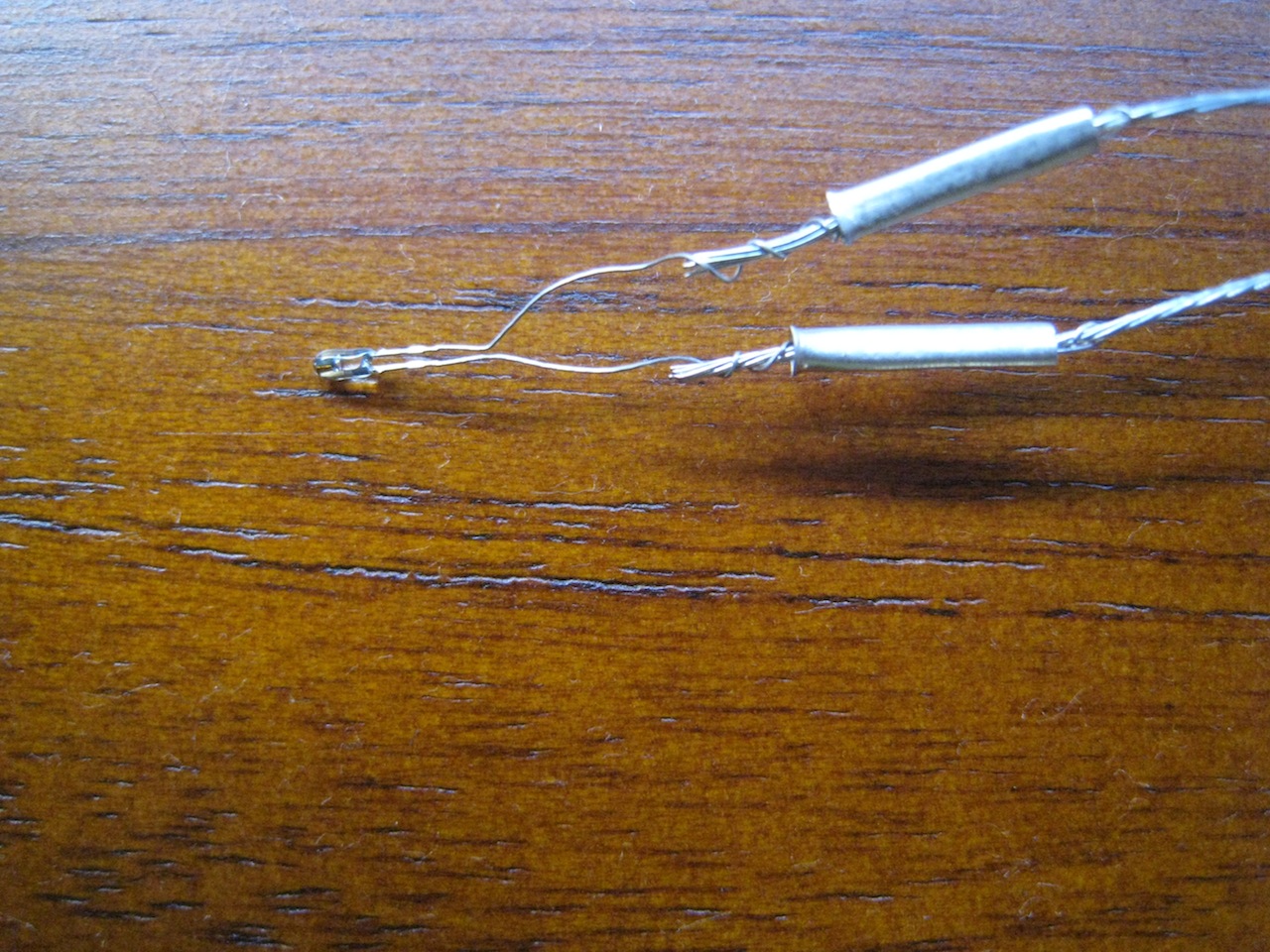
The biggest hassle with assembling the hot-end is trying to protect the thermistor. It’s quite fragile, and the arms can break quite easily. So naturally enough, you start off by wiring up the thermistor. The very thin connecting wires were quite fiddly to try and strip as well.
The connected thermistor
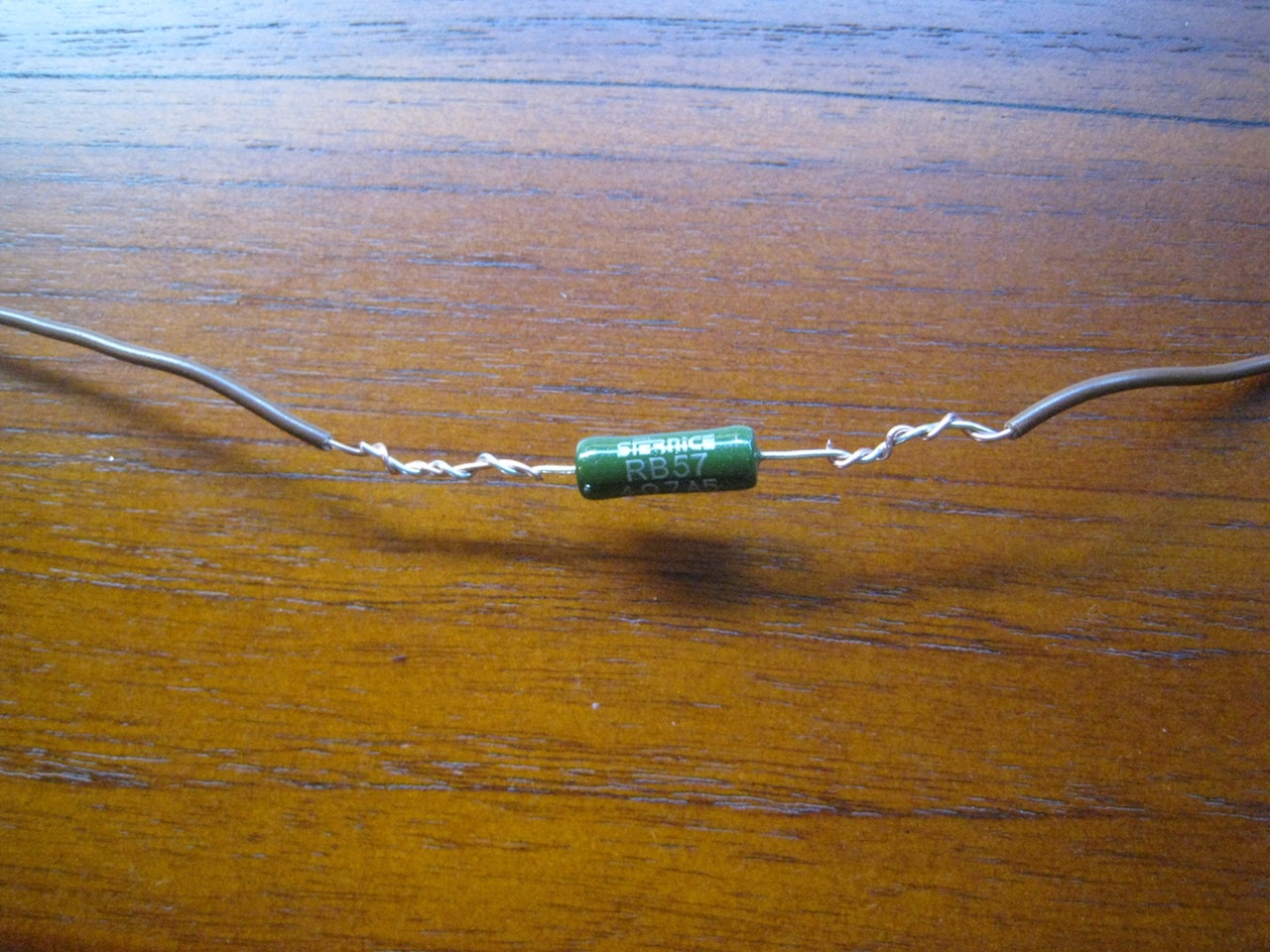
After that, you need to connect up the power resistor in a similar way.
Power Resistor
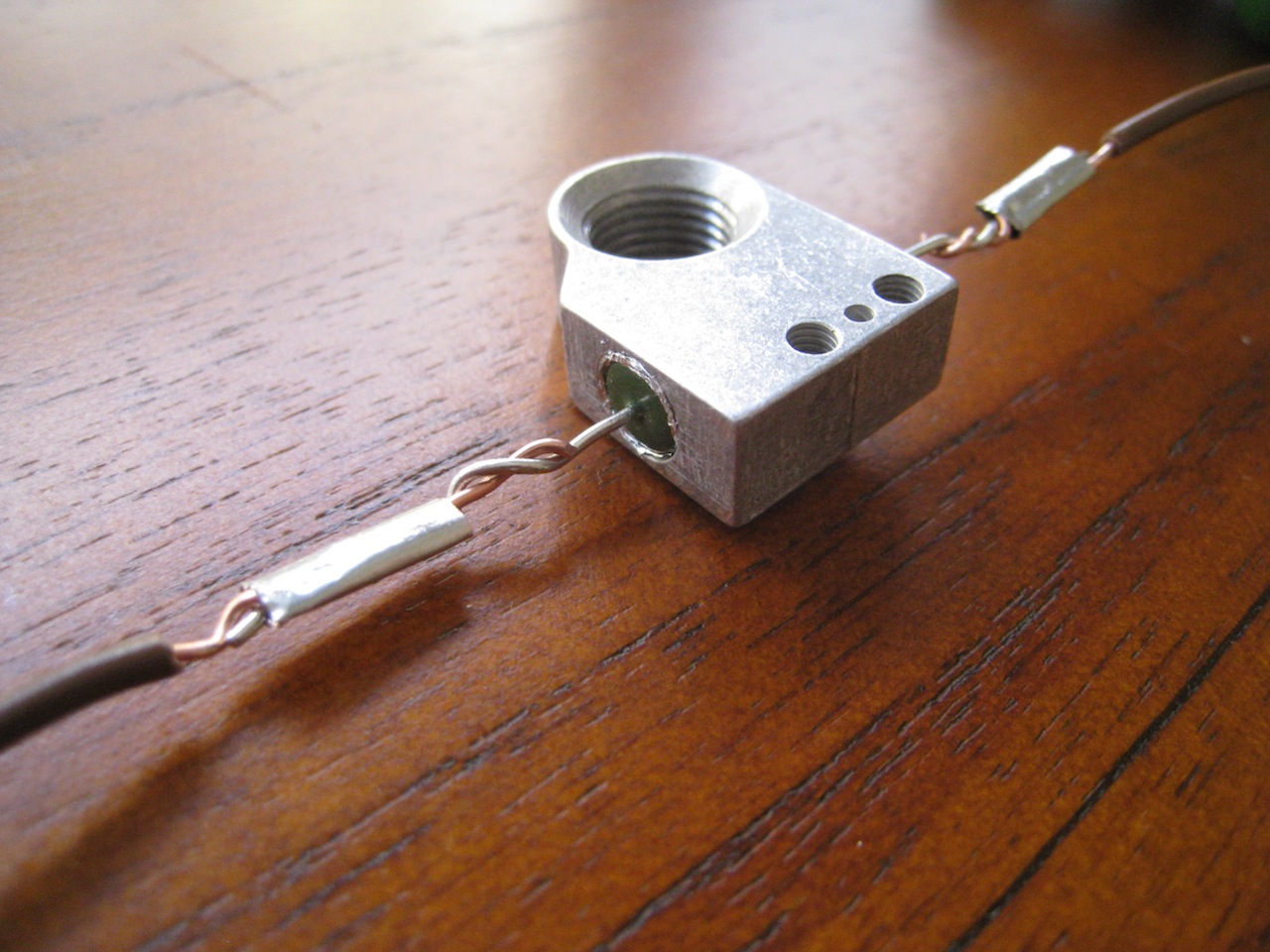
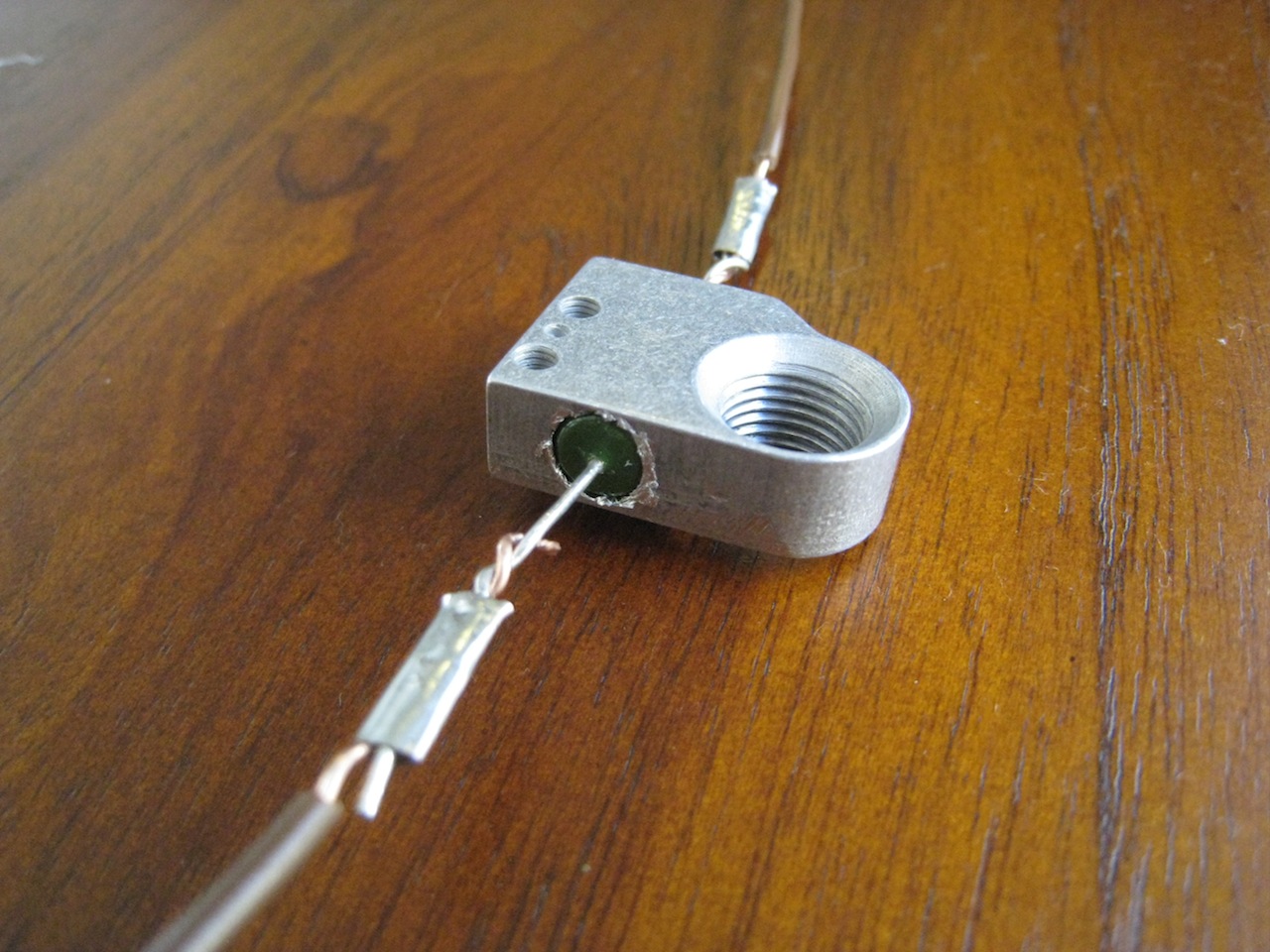
Next up is to fit the power resistor into the heating block. It’s quite interesting to see that most of the hot part of the hot-end is made of aluminium. I haven’t chatted with Laslo, but I suspect that it’s because the thermal gradient on aluminium is extremely steep. Away from the active heating area, it will cool down extremely quickly. I suspect that this is why Arcol design has such a short hot zone.
This also makes it easy to fit the power resistor, as you can then safely use aluminium foil as a wrap around the power resistor to ensure a tight fit.
The fitted power resistor
The next step is to put in the thermistor and seal it into place using fire cement. In Lazlo’s build instructions he usually attaches the nozzle first, probably to make sure that there’s enough space for it to screw it. I didn’t want to risk contaminating the nozzle with any rogue cement, so I did it separately. I first wrapped up all the bits that weren’t going to get fire cement on them with Kapton tape, then put in the cement. I then left it to dry for a couple of days.
Cemented-in thermistor with Kapton tape
Kapton removed
That’s the hardest parts of the build completed. The remainder is very easy, just basically screwing together the remaining components. The lower frame is first:
Lower mounting frame
The wires are protected with heat-resistant covers then the nozzle assembly is attached to the frame. The covers weren’t quite long enough to prevent the thermistor’s trailing leads from touching each other, so I wrapped some more Kapton tape around them to stop them shorting out.
Nozzle fitted to lower assembly
Rotated view
At this point, the instructions on the website diverge slightly from the current hot-end. The instructions on the website are for version 3.0 of the hot-end, but the version he’s currently selling is version 3.01. There are only small differences, mostly down to an improved heat-sink. It’s pretty easy to guess the correct way to put the remaining pieces together.
The completed hot-end
In all, quite a fun and interesting build. My only gripe is that the PEEK block doesn’t sit totally flush with the lower mounting assembly. This results in a very slight angle to the nozzle. You can see this in the photo below. I can’t really see how this could be a problem for printing though. The millimetre or two of offset isn’t going to cause any problems, as long as it’s consistent.
Slight angle on nozzle